| |
|
|
|
Curiosity Plus Mapper UAV
Curiosity is a FULLY AUTONOMOUS Mini Unmanned Multicopter aircraft designed for mapping. It is capable of carrying a 300
Gram payload. Most mapping cameras are under 300 Grams. The UAV is electrically powered with a very low dB level. The
aircraft is fully autonomous right from Takeoff to Landing. The UAV is made of composite carbon fiber and aluminum alloy.
|
|
| Physical Specifications: |
| |
Size |
: |
650mm x650mm |
| |
Height |
: |
250 mm |
| |
Flying Weight |
: |
1995 Gms |
| |
Payload |
: |
300 Gms |
| |
Propulsion |
: |
180 Watt BLDC Motors @14.8 Volt X 4 |
| |
Propeller |
: |
15" carbon fiber X 4 |
| |
Flying Battery |
: |
Lithium-Ion 14.8 Volt, 9600mAh, |
| |
|
|
|
|
|
| Flying Characteristics: |
| |
Range |
: |
4.0 Km * |
| |
Endurance |
: |
50 Mins |
| |
Accuracy |
: |
Within 3 m of the programmed way point |
| |
Cruise Speed |
: |
30 Km/Hr |
| |
Max Wind Resistance |
: |
20 Km/Hr. |
| |
Optimum Mapping Altitude |
: |
120 Meters AGL |
| |
Altitude Ceiling |
: |
3000 Meters |
| |
Can Cover |
: |
1.0kmx1.0km of mapping areain one flight when flown at 120m. |
|
| |
|
| Capabilities: |
- Fully Autonomous from Takeoff to Landing.
- The mapping grid is generated automatically.
- The camera's shutter will function only after reaching the
1st grid point.
- Can Loiter over the subject at any way point.
- Has Manual over ride at any stage.
- Failsafe built in. Will 'RTL' if communication link is lost. Will
'Land' if battery is low.
|
|
| Autopilot: |
- Based on ARM Cortex M4 32 bit Processor @168 MHz, running at 252 MIPS, on Nuttx Real Time Operating System.
- Triple redundant vibration damped IMU.
- uBlox RTK GPS on Rover and Base
- HMC5883L 3-Axis triple redundant Magnetometer
- MS5611 Dual redundant High Resolution Barometer
- Onboard Micro SD card for Flight Data Logging
- Inbuilt heating for Sensors for flying in very low temperatures.
|
|
| |
|
| Radio Control Link: |
| |
Encoding |
: |
PPM |
| |
Freq |
: |
2400 MHz |
| |
Channels |
: |
10 |
| |
Range |
: |
5.0 Km (when airborne)
|
| |
Display |
: |
Back-Lit Display |
| |
Battery |
: |
Li-Poly 11.1V, 2650 mAh (12 Hrs continuous operation). |
|
| Data Communication Link: |
| |
Type |
: |
MAV-Link |
| |
Dedicated |
: |
Encrypted Data Link |
| |
RF Power |
: |
1000 mW |
| |
Frequency |
: |
2400 Mhz, secured(20Mhz Channel) |
| |
Power Consumption |
: |
100 mA @ 12 V |
| Full Flight Data Recording onboard and GCS. |
|
|
| RTK GPS: |
-
u-Blox M8P RTK GPS on base and rover. The base GPS
has very high gain antenna to achieve 'Survey-In' in the least possible time. Strong communication link between
base and drone ensures uninterrupted RTK corrections in real time.
|
| |
|
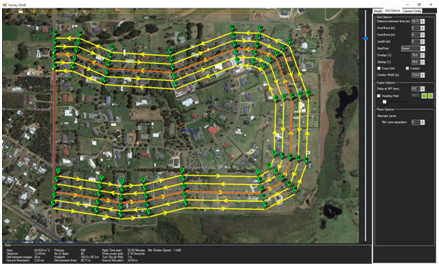
| Survey Camera: |
-
The aircraft is fitted with a CANON camera with modified
firmware enabled with KAP_UAV.lua script which optimizes the
camera for mapping shots and takes still shots along the grid
waypoints. The pictures are then geo-tagged using the GCS
software and then processed on a mapping software like
Pix4D to form a 3D map that can be used for engineering
purpose. Any other suitable mapping camera can be installed
if it is under 300 Gms.
|
|
| |
|
| Standard Package : |
- Curiosity Aircraft 1 Nos. fitted with RTK GPS
- GCS consisting 1280x720 HD Video Display.
- Android Tablet 7".
- Dual Omni Antenna for Communication Link.
- Microprocessor based battery Charger.
- Radio Control Box.
- Canon Powershot Camera with modified firmware.
- Mini Tool Kit.
- ABS Carry Case
|
|
| |
|
|
|
|
|